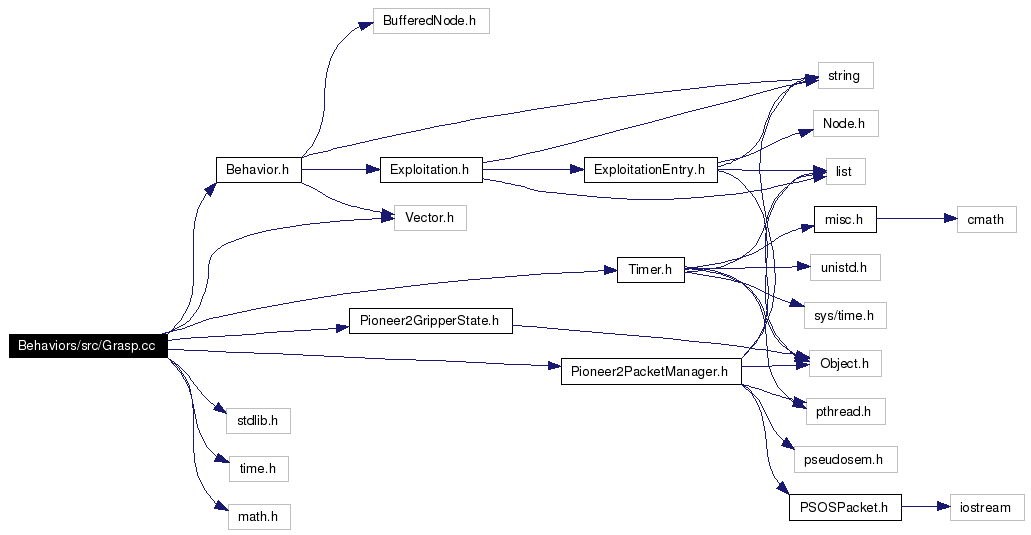
#include "Behavior.h"
#include "Timer.h"
#include "Vector.h"
#include "Pioneer2PacketManager.h"
#include "Pioneer2GripperState.h"
#include <stdlib.h>
#include <time.h>
#include <math.h>
Include dependency graph for Grasp.cc:
Namespaces | |
| namespace | RobotFlow |
Data Structures | |
| class | RobotFlow::Grasp |
Variables | |
| static const short & | RobotFlow::GRIPopen = Pioneer2PacketManager::GRIPOPEN |
| static const short & | RobotFlow::GRIPclose = Pioneer2PacketManager::GRIPCLOSE |
| static const short & | RobotFlow::GRIPstop = Pioneer2PacketManager::GRIPSTOP |
| static const short & | RobotFlow::LIFTup = Pioneer2PacketManager::LIFTUP |
| static const short & | RobotFlow::LIFTdown = Pioneer2PacketManager::LIFTDOWN |
| static const short & | RobotFlow::LIFTstop = Pioneer2PacketManager::LIFTSTOP |
| static const short & | RobotFlow::GRIPstore = Pioneer2PacketManager::GRIPSTORE |
| static const short & | RobotFlow::GRIPdeploy = Pioneer2PacketManager::GRIPDEPLOY |
| static const short & | RobotFlow::GRIPhalt = Pioneer2PacketManager::GRIPHALT |
| static const short & | RobotFlow::GRIPpress = Pioneer2PacketManager::GRIPPRESS |
| static const short & | RobotFlow::LIFTcarry = Pioneer2PacketManager::LIFTCARRY |
| const unsigned char | RobotFlow::DOING_NOTHING = 0 |
| const unsigned char | RobotFlow::STORING = 1 |
| const unsigned char | RobotFlow::DEPLOYING = 2 |
| const unsigned char | RobotFlow::GRASPING = 3 |
| const unsigned char | RobotFlow::CARRYING = 4 |
| const unsigned char | RobotFlow::RELEASING = 5 |
| const unsigned char | RobotFlow::MOVING_AWAY = 6 |
 1.4.4
1.4.4