|
Public Member Functions |
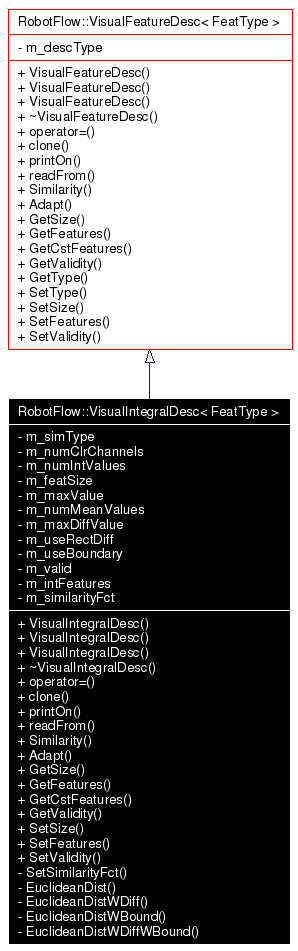
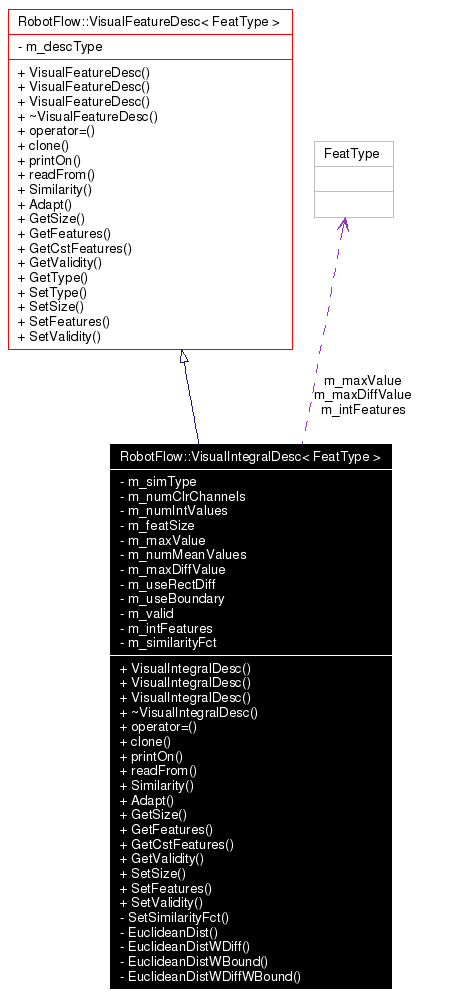
| | VisualIntegralDesc () |
| | VisualIntegralDesc (e_VISUALINTDESC_similarityType i_simType, unsigned int i_numClrChannels, unsigned int i_numIntValues, FeatType i_maxValue, bool i_useRectDiff, bool i_useBoundary) |
| | VisualIntegralDesc (const VisualIntegralDesc< FeatType > &i_ref) |
| | ~VisualIntegralDesc () |
| VisualIntegralDesc< FeatType > & | operator= (const VisualIntegralDesc< FeatType > &i_ref) |
| VisualIntegralDesc< FeatType > * | clone () const |
| void | printOn (std::ostream &out) const |
| void | readFrom (std::istream &in) |
| double | Similarity (const FeatType *i_candidate, unsigned int i_size) const |
| void | Adapt (const FeatType *i_candidate, unsigned int i_size, double i_rate) |
| unsigned int | GetSize () const |
| FeatType * | GetFeatures () |
| const FeatType * | GetCstFeatures () const |
| bool | GetValidity () const |
| void | SetSize (unsigned int i_size) |
| void | SetFeatures (const FeatType *i_ref, unsigned int i_size) |
| void | SetValidity (bool i_flag) |
| | VisualFeatureDesc () |
| | VisualFeatureDesc (e_VISUALDESCRIPTOR_type i_descType) |
| | VisualFeatureDesc (const VisualFeatureDesc< FeatType > &i_ref) |
| virtual ObjectRef | clone () |
| e_VISUALDESCRIPTOR_type | GetType () const |
| void | SetType (e_VISUALDESCRIPTOR_type i_type) |
| void | ref () |
| void | unref () |
| int | unique () |
| virtual void | destroy () |
| virtual void | serialize (std::ostream &out) const |
| virtual void | unserialize (std::istream &in) |
| virtual void | doesNotUnderstand (std::string method) |
| virtual bool | isNil () const |
| virtual void | prettyPrint (std::ostream &out=std::cout) const |
| virtual std::string | className () const |
Static Public Member Functions |
| static ObjectRef | newObject (const std::string &objType) |
| static int | addObjectType (const std::string &objType, _ObjectFactory *factory) |
static std::map< std::string,
_ObjectFactory * > & | ObjectFactoryDictionary () |
| static TypeMap< _ObjectFactory * > & | TypeidDictionary () |
Protected Attributes |
| AtomicCounter | ref_count |
Private Member Functions |
| void | SetSimilarityFct () |
| double | EuclideanDist (const FeatType *i_candidate) const |
| double | EuclideanDistWDiff (const FeatType *i_candidate) const |
| double | EuclideanDistWBound (const FeatType *i_candidate) const |
| double | EuclideanDistWDiffWBound (const FeatType *i_candidate) const |
Private Attributes |
| e_VISUALINTDESC_similarityType | m_simType |
| unsigned int | m_numClrChannels |
| unsigned int | m_numIntValues |
| unsigned int | m_featSize |
| FeatType | m_maxValue |
| unsigned int | m_numMeanValues |
| FeatType | m_maxDiffValue |
| bool | m_useRectDiff |
| bool | m_useBoundary |
| bool | m_valid |
| FeatType * | m_intFeatures |
| double(VisualIntegralDesc::* | m_similarityFct )(const FeatType *) const |
Friends |
| friend std::ostream & | operator<< (std::ostream &out, const Object &obj) |
 1.4.4
1.4.4