A cell is a sequence of connected pixels of the same value (same line).
|
Public Member Functions |
| | ImageCell () |
| | ImageCell (int x1, int y1, int x2, int y2, int color) |
| | ImageCell (const ImageCell &cpy) |
| bool | operator== (const ImageCell &eq) |
| ImageCell & | operator= (const ImageCell &c) |
| void | set_values (int x1, int y1, int x2, int y2) |
| void | get_values (int &x1, int &y1, int &x2, int &y2) |
| double | center_x () |
| double | center_y () |
| int | size () |
| int | get_color () |
| void | set_color (int color) |
| void | printOn (std::ostream &out=std::cout) const |
| void | readFrom (std::istream &in) |
| void | ref () |
| void | unref () |
| int | unique () |
| virtual void | destroy () |
| virtual void | serialize (std::ostream &out) const |
| virtual void | unserialize (std::istream &in) |
| virtual void | doesNotUnderstand (std::string method) |
| virtual bool | isNil () const |
| virtual void | prettyPrint (std::ostream &out=std::cout) const |
| virtual ObjectRef | clone () |
| virtual std::string | className () const |
Static Public Member Functions |
| static ObjectRef | newObject (const std::string &objType) |
| static int | addObjectType (const std::string &objType, _ObjectFactory *factory) |
static std::map< std::string,
_ObjectFactory * > & | ObjectFactoryDictionary () |
| static TypeMap< _ObjectFactory * > & | TypeidDictionary () |
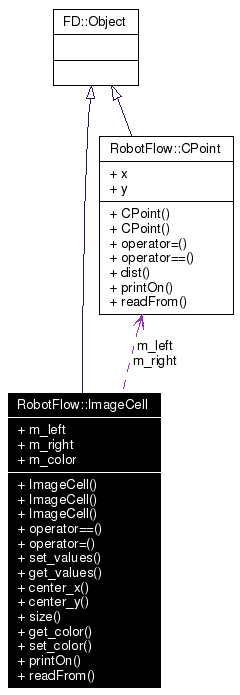
Data Fields |
| CPoint | m_left |
| | The upper left corner.
|
| CPoint | m_right |
| | The lower right corner.
|
| int | m_color |
| | The color of the cell.
|
Protected Attributes |
| AtomicCounter | ref_count |
Friends |
| friend std::ostream & | operator<< (std::ostream &out, const Object &obj) |
 1.4.4
1.4.4