|
Public Member Functions |
| | VisualTarget () |
| | VisualTarget (int i_id, VisualROI *i_roi, FD::Vector< VisualFeatureDesc< FeatBaseType > * > *i_targetDesc) |
| | VisualTarget (const VisualTarget< FeatBaseType > &i_ref) |
| | ~VisualTarget () |
| VisualTarget< FeatBaseType > & | operator= (VisualTarget< FeatBaseType > &i_ref) |
| void | printOn (std::ostream &out) const |
| void | readFrom (std::istream &in) |
| void | Adapt (FD::Vector< VisualFeatureDesc< FeatBaseType > * > *i_desc, double i_rate) |
| void | Adapt (FD::Vector< VisualFeatureDesc< FeatBaseType > * > *i_desc, double *i_rate) |
| double | Similarity (FD::Vector< VisualFeatureDesc< FeatBaseType > * > *i_desc) |
| double | SimilarityWCueAdapt (FD::Vector< VisualFeatureDesc< FeatBaseType > * > *i_desc, double i_rate) |
| void | AgeTarget (bool i_matched) |
| bool | IsValid () const |
| int | GetID () const |
| int | GetActiveAge () const |
| int | GetPassiveAge () const |
| int | GetCurrentAge () const |
| VisualROI * | GetROI () |
| const VisualROI * | GetCstROI () const |
| FD::RCPtr< VisualROI > | GetROIRCPtr () |
| int | GetNumDescriptors () const |
| int | GetCurDescIdx () const |
FD::Vector< VisualFeatureDesc<
FeatBaseType > * > * | GetDescriptorsVec () |
const FD::Vector< VisualFeatureDesc<
FeatBaseType > * > * | GetCstDescriptorsVec () const |
| VisualFeatureDesc< FeatBaseType > * | GetDescriptor (int i_idx) |
| const VisualFeatureDesc< FeatBaseType > * | GetCstDescriptor (int i_idx) const |
| double * | GetCueWeights () |
| const double * | GetCueWeights () const |
| double | GetCueWeight (int i_idx) const |
| void | SetValidity (bool i_valid) |
| void | SetID (int i_id) |
| void | InitAges () |
| void | SetActiveAge (int i_age) |
| void | SetPassiveAge (int i_age) |
| void | SetROI (VisualROI *i_roi) |
| void | SetNumDescriptors (int i_numDesc) |
| void | SetCurDescIdx (int i_idx) |
| void | SetDescriptorsVec (FD::Vector< VisualFeatureDesc< FeatBaseType > * > *i_descVec) |
| void | SetDescriptor (VisualFeatureDesc< FeatBaseType > *i_desc, int i_idx) |
| void | InitCueWeights () |
| void | SetCueWeights (double *i_weight) |
| void | SetCueWeight (double i_weight, int i_idx) |
| void | ref () |
| void | unref () |
| int | unique () |
| virtual void | destroy () |
| virtual void | serialize (std::ostream &out) const |
| virtual void | unserialize (std::istream &in) |
| virtual void | doesNotUnderstand (std::string method) |
| virtual bool | isNil () const |
| virtual void | prettyPrint (std::ostream &out=std::cout) const |
| virtual ObjectRef | clone () |
| virtual std::string | className () const |
Static Public Member Functions |
| static ObjectRef | newObject (const std::string &objType) |
| static int | addObjectType (const std::string &objType, _ObjectFactory *factory) |
static std::map< std::string,
_ObjectFactory * > & | ObjectFactoryDictionary () |
| static TypeMap< _ObjectFactory * > & | TypeidDictionary () |
Protected Attributes |
| AtomicCounter | ref_count |
Private Attributes |
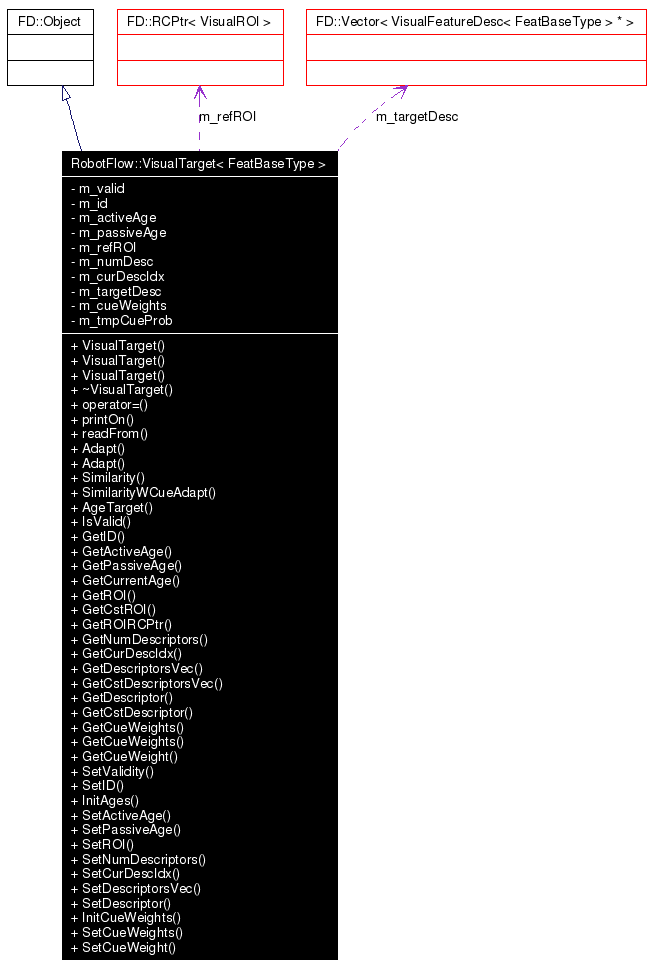
| bool | m_valid |
| int | m_id |
| int | m_activeAge |
| int | m_passiveAge |
| FD::RCPtr< VisualROI > | m_refROI |
| int | m_numDesc |
| int | m_curDescIdx |
FD::Vector< VisualFeatureDesc<
FeatBaseType > * > * | m_targetDesc |
| double * | m_cueWeights |
| double * | m_tmpCueProb |
Friends |
| friend std::ostream & | operator<< (std::ostream &out, const Object &obj) |

 1.4.4
1.4.4