IMU400CC_200.cc File Reference
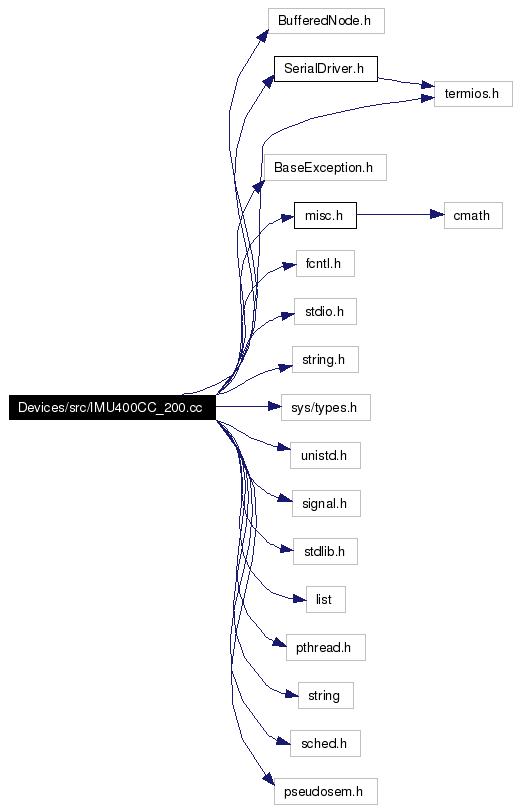
#include "BufferedNode.h"
#include "SerialDriver.h"
#include "BaseException.h"
#include "misc.h"
#include <fcntl.h>
#include <stdio.h>
#include <string.h>
#include <sys/types.h>
#include <unistd.h>
#include <signal.h>
#include <termios.h>
#include <stdlib.h>
#include <list>
#include <pthread.h>
#include <string>
#include <sched.h>
#include "pseudosem.h"
Include dependency graph for IMU400CC_200.cc:
Define Documentation
| #define IMU_GR_PRECISION 10.0 |
|
| #define IMU_GRAVITY_ACCEL_VALUE 9.80 |
|
| #define IMU_PACKET_SIZE 18 |
|
| #define IMU_RR_PRECISION 200.0 |
|
| #define IMU_TIME_PRECISION 0.79E-6 |
|
Generated on Wed Oct 5 14:36:12 2005 for RobotFlow by
 1.4.4
1.4.4